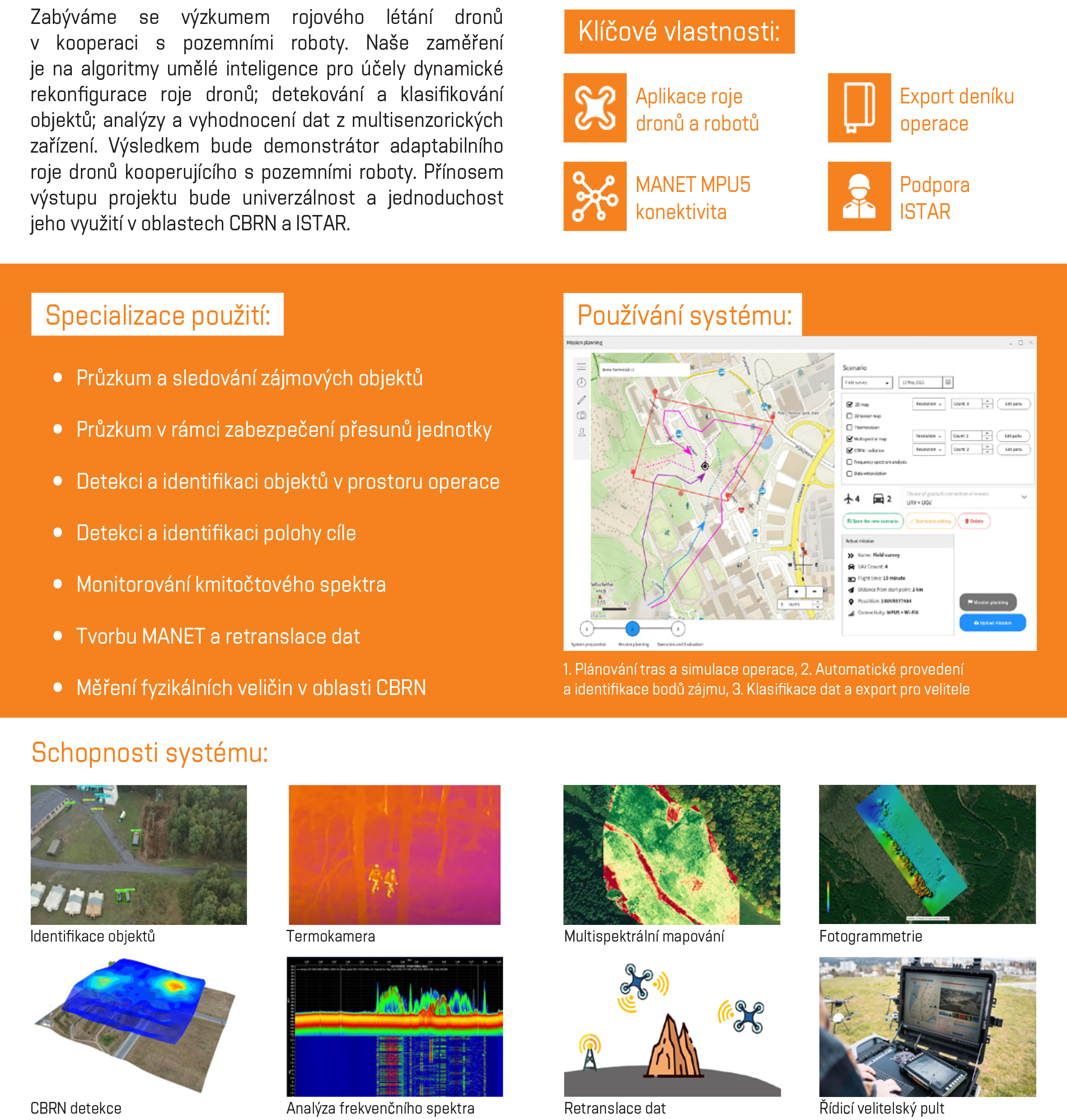
Projekt se zabývá výzkumem rojového létání dronů v kooperaci s pozemními roboty. Výzkum bude prováděn v několika oblastech. Jednou z nich je zaměření na algoritmy umělé inteligence pro účely dynamické rekonfigurace roje dronů; detekování a klasifikování objektů; analýzy a vyhodnocení dat z moderních senzorů. Rovněž budou vytvářeny modely robotických systémů za účelem stanovení mezních parametrů, kritérií a účelové funkce pro danou činnost. Modely souvisejí s optimalizací trajektorií prvků navrhovaného systému. Na základě získaných znalostí, stanovených metod, nástrojů a technologií bude vytvořen demonstrátor adaptabilního roje dronů kooperujícího s pozemními roboty. Přínosem výstupu projektu bude univerzálnost jeho využití v oblastech jako např.: CBRN, nalezení osob, zpravodajské a průzkumné účely.
Další osoby podílející se na řešení:
Gábrlík Petr, Ing., Ph.D. - spoluřešitel
Janoušek Jiří, Ing. - spoluřešitel
Kadlec Radim, Ing., Ph.D. - spoluřešitel
Mikulka Jan, doc. Ing., Ph.D. - spoluřešitel
Pintér Marco, Bc. - spoluřešitel
Procházka Martin - spoluřešitel
Raichl Petr, Ing. - spoluřešitel
Szabó Zoltán, Ing., Ph.D. - spoluřešitel
Klouda Jan, Bc. - spoluřešitel
Kolísek Josef, Bc. - spoluřešitel
Žalud Luděk, prof. Ing., Ph.D. - spoluřešitel
Výzkum je prováděn v Laboratoři bezpilotních letadel a senzoriky

Univerzita obrany - Fakulta vojenských technologií Brno - prof. Dr. Ing. Alexandr Štefek
Aplikační garant: Armáda České republiky
VUT - FEKT - Ústav automatizace a měřicí techniky - prof. Ing. Luděk Žalud, Ph.D.
JANOUŠEK, J.; SEMERÁD, J. Fusion of sensors for autonomous UAV Navigation. In PROCEEDINGS II OF THE 28TH STUDENT EEICT 2022 Selected Papers. 1. Brno: Vysoké učení technické v Brně, Fakulta elektrotechniky a komunikačních technologií, 2022. p. 63-66. ISBN: 978-80-214-6030-0.
CIHLÁŘ, M.; RAICHL, P.; GÁBRLÍK, P.; JANOUŠEK, J.; MARCOŇ, P.; ŽALUD, L.; LÁZNA, T.; MICHENKA, K.; NOHEL, J; a A Štefek. Simulation of Autonomous Robotic System for Intelligence and Reconnaissance Operations. In proc. of MESAS 2022.
STODOLA, Petr; NOHEL, Jan. Adaptive Ant Colony Optimization with Node Clustering for the Multi-Depot Vehicle Routing Problem. IEEE Transactions on Evolutionary Computation. ISSN 1089-778X. Přijato k publikování, vyjde v roce 2023.