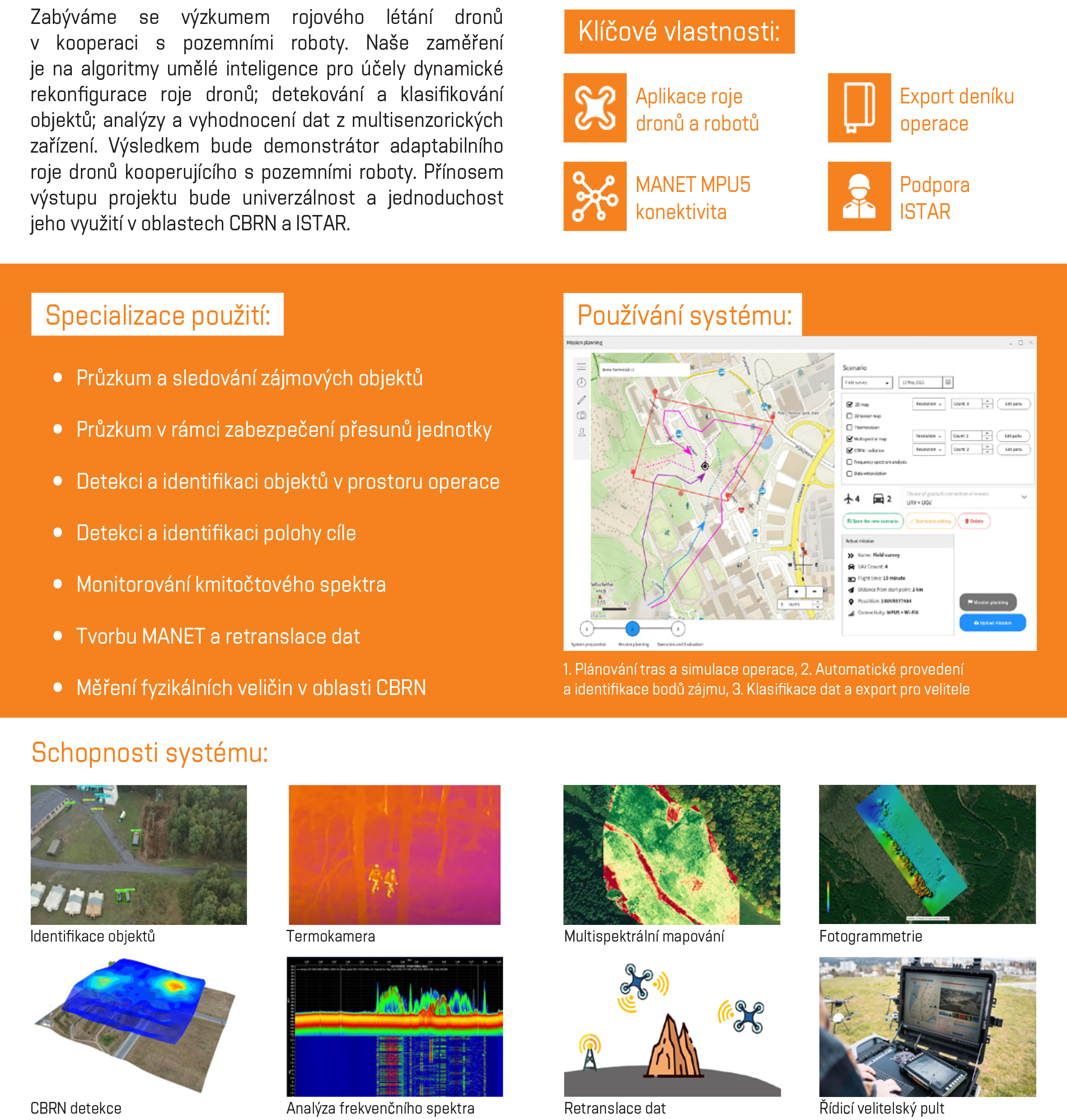
The project has been designed to investigate drone swarms flying in coordination with terrestrial robots. The research will focus on diverse relevant means, problems, and activities, such as UI algorithms to reconfigure a drone swarm; object detection and classification; sensor-based data analysis and evaluation; and modeling robotic systems to define the limit parameters, criteria, and objective functions that optimize the trajectories of the elements of a concrete system. The obtained knowledge and adopted methods, instruments, and technologies will enable us to create a demonstrator of an adaptable drone swarm collaborating with terrestrial robots. The outputs will be applicable in, for example, CBRN operations, personal detection, and perimeter search. |
Other people involved in the solution:
Gábrlík Petr, Ing., Ph.D.
Janoušek Jiří, Ing.
Kadlec Radim, Ing., Ph.D.
Mikulka Jan, doc. Ing., Ph.D.
Pintér Marco, Bc.
Procházka Martin
Raichl Petr, Ing.
Szabó Zoltán, Ing., Ph.D.
Klouda Jan, Bc.
Žalud Luděk, prof. Ing., Ph.D. - spoluřešitel
The research is carried out in the Laboratory of Unmanned Aerial Vehicles and Sensors

University of Defense - Faculty of Military Technologies Brno - Prof. Dr. Ing. Alexander Štefek
Application guarantor: Army of the Czech Republic
BUT - FEKT - Institute of Automation and Measuring Technology - Prof. Ing. Luděk Žalud, Ph.D.
JANOUŠEK, J.; SEMERÁD, J. Fusion of sensors for autonomous UAV Navigation. In PROCEEDINGS II OF THE 28TH STUDENT EEICT 2022 Selected Papers. 1. Brno: Vysoké učení technické v Brně, Fakulta elektrotechniky a komunikačních technologií, 2022. p. 63-66. ISBN: 978-80-214-6030-0.
CIHLÁŘ, M.; RAICHL, P.; GÁBRLÍK, P.; JANOUŠEK, J.; MARCOŇ, P.; ŽALUD, L.; LÁZNA, T.; MICHENKA, K.; NOHEL, J; a A Štefek. Simulation of Autonomous Robotic System for Intelligence and Reconnaissance Operations. In proc. of MESAS 2022.
STODOLA, Petr; NOHEL, Jan. Adaptive Ant Colony Optimization with Node Clustering for the Multi-Depot Vehicle Routing Problem. IEEE Transactions on Evolutionary Computation. ISSN 1089-778X. Přijato k publikování, vyjde v roce 2023.