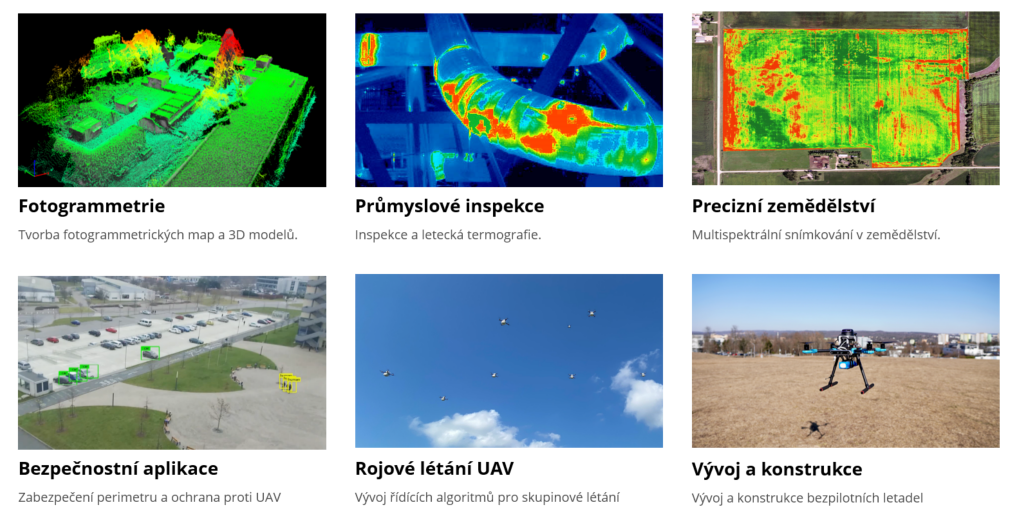
The research lab focuses on remote sensing of the Earth using unmanned aerial vehicles and on the evaluating relevant image data in various segments of precision agriculture, cartography, and geography. Multispectral or thermal imaging and map bases allow the compilation of plans and 3D models. Further, the lab’s drones also facilitate measuring magnetic fields and chemical substances in the air. The team are also involved in the development of software for autonomous flight control units based on image processing and the development of defences against drones.
Room: SC3.83
Responsible person:
doc. Ing. Petr Marcoň, Ph.D. - marcon@vut.cz
Current projects:

Robotický systém řízený algoritmy umělé inteligence pro zpravodajské a průzkumné účely
The project deals with research on swarm flying of drones in cooperation with ground robots. The research will be carried out in several areas. One of them is the focus on artificial intelligence algorithms for the purpose of dynamic reconfiguration of drone swarms; object detection and classification; analysis and evaluation of data from advanced sensors. Also, models of robotic systems will be created in order to establish boundary parameters, criteria and a purpose function for a given activity. The models are related to the optimization of the trajectories of the elements of the proposed system. Based on the acquired knowledge, established methods, tools and technologies, a demonstrator of an adaptive swarm of drones cooperating with ground robots will be created. The benefit of the project output will be the versatility of its use in areas such as: CBRN, personnel retrieval, intelligence and reconnaissance purposes.
Teaching the course:
FEKT-BPC-BPL Bezpilotní letadla
The course deals with the issues of unmanned aircraft from basic theoretical knowledge to practical training of flight formations. Theoretical knowledge includes basic information about drones and legislation. More information about the course.
Main activities
- Development of autonomous aircraft in the ROS robotic operating system
- Creation of map bases using multispectral imaging and airborne thermography
- Elevation inspections, 3D models and thermographic measurements
- Analysis, evaluation and detection of objects from image data
- Development of components for wireless charging of drones
- Development and implementation of artificial intelligence algorithms for swarm flying
- Research on sensors and design of unmanned vehicles







Laboratory equipment
- DJI Matrice 600 pro drone
- Unmanned aerial vehicles for autonomous flights
- VTOL unmanned aerial vehicle
- MicaSense RedEdge Multispectral Camera
- Workswell WIRIS Pro 30 mK inspection thermal imaging camera with ultrazoom
- Microcomputers for machine learning and artificial intelligence
- Prusa MK3S, Prusa SL1S + CW1S, Ultimaker S3 3D printers
